 東京大学 研究
東京大学 研究マルチモーダル認識を備えた実用的なオープンソース4脚ロボット「MEVIUS2」
~Eコマースで部品調達可能な大型四脚ロボットの設計データを無償公開~
【注目の成果:共同研究・産学連携のためのチェックポイント】
 | ロボット工学分野におけるオープンソースハードウェアの普及と、高度な自律移動ロボットの研究開発に大きく役立つことが期待 |
【産学連携対象 全学共通分野 Discovery Saga】
【Sagaキーワード】
2026/04/01
概要
東京大学 次世代知能科学研究センターの河原塚健人講師らによる研究グループは、板金溶接とマルチモーダル認識を備えた実用的なオープンソース4脚ロボット「MEVIUS2」を開発しました。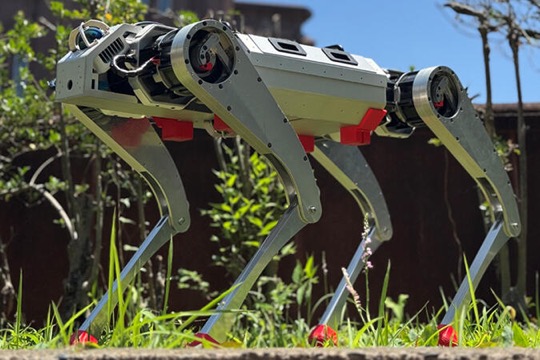
MEVIUS2 本研究では、Eコマースで発注可能な板金溶接および金属切削部品を用いることで、高い耐久性を持つ大型4脚ロボットを安価に開発し、多様な不整地の踏破および詳細な環境認識を実証しました。先行研究と比較して、3Dプリンタ製よりも大型かつ高耐久であり、かつLiDARやHDRカメラを備え実用的である点で新規性があり、この研究成果は今後、ロボット工学分野におけるオープンソースハードウェアの普及と、高度な自律移動ロボットの研究開発に大きく役立つことが期待されます。
この研究成果は、「IEEE Robotics and Automation Practice」に掲載されました。
研究成果についての詳細は【情報理工_プレスリリース_20260401】をご覧下さい。
論文情報
雑誌名:IEEE Robotics and Automation Practice題 名:MEVIUS2: Practical Open-Source Quadruped Robot with Sheet Metal Welding and Multimodal Perception
著者名:Kento Kawaharazuka, Keita Yoneda, Shintaro Inoue, Temma Suzuki, Jun Oda, Kei Okada
DOI:10.1109/RAP.2026.3672680
URL:https://ieeexplore.ieee.org/document/11429076