 東京大学 研究
東京大学 研究ソフトロボット用新型アクチュエータの非線形ダイナミクスをAIで学習
~リザバー計算でヒステリシスを学習、繊細なグリッパー動作へ~
【産学連携対象 全学共通分野 Discovery Saga】
【Sagaキーワード】
2025/10/19
概要
東京大学大学院情報理工学系研究科のタ デゥックトゥン助教と、同大学大学院工学系研究科カレメル セドリック特任助教と川原圭博教授、テキサス大学、リバプール大学らの研究グループは、柔軟な素材を主体としたソフトロボットの駆動装置(アクチュエータ)として有望視される「液体相変化パウチアクチュエータ」の制御において、その複雑な挙動を高い精度で予測する新手法を開発しました。開発した技術で、壊れやすいポテトチップス等を掴むグリッパーを実装し、ロボットの身体自体が情報処理を担う新機構を実証しました。
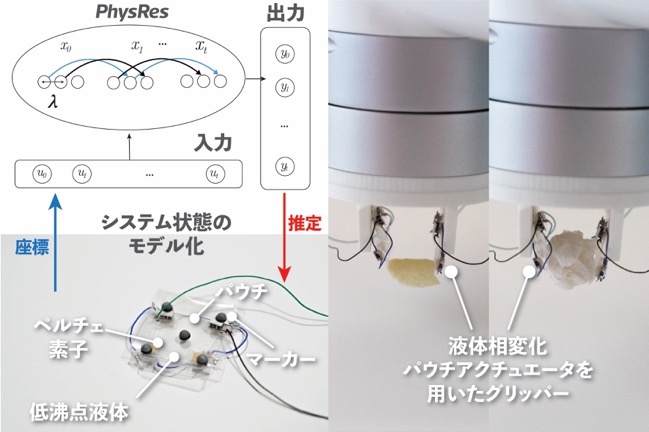
液体相変化パウチアクチュエータとソフトグリッパの構成と動作例
今回の成果により、将来的には、壊れやすい物体を巧みに扱うソフトロボットグリッパーや、人の動きに自然に寄り添う次世代ウェアラブル機器などへの応用が期待されます。
この研究成果は、中国時間2025年10月19日0時(日本時間10月19日午前1時)にThe 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS 2025)で発表されました。
詳しくは【情報理工_プレスリリース_20251019】をご覧ください。
学会情報
学会名:The 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2025)題名:Modeling The States of Liquid Phase Change Pouch Actuators by Reservoir Computing
著者名:Cedric Caremel*, Khang Nguyen*, Anh Nguyen, Manfred Huber, Yoshihiro Kawahara, and Tung D. Ta, (*co-first authors)
URL:https://iros25.org/