 東京大学 研究
東京大学 研究マルチエージェントAIによるゼロショット言語駆動ロボット把持システム開発
~自然言語の指示に対応、実環境での安全なロボット操作を実現~
【産学連携対象 全学共通分野 Discovery Saga】
【Sagaキーワード】
2025/10/19
概要
東京大学大学院情報理工学系研究科のタ デゥックトゥン助教を含む国際研究チームは、言語指示によって、ロボットが手やアームを使って物体をつかみ、持ち上げたり移動させたりする基本的な動作(ロボット把持)を可能にする新手法「GraspMAS」を開発しました。従来のロボット把持手法は、特定のデータセットを用いた学習済み単一モデルに依存しており、複雑な言語による指示や未学習環境への対応に課題がありました。
GraspMASは、自然言語処理、視覚認識、把持推論を担う複数のAIエージェントが協調することにより、人間の曖昧な言語指示にも対応し、未知の環境下でも事前学習無しで新しい状況にも柔軟に対応することが可能です。
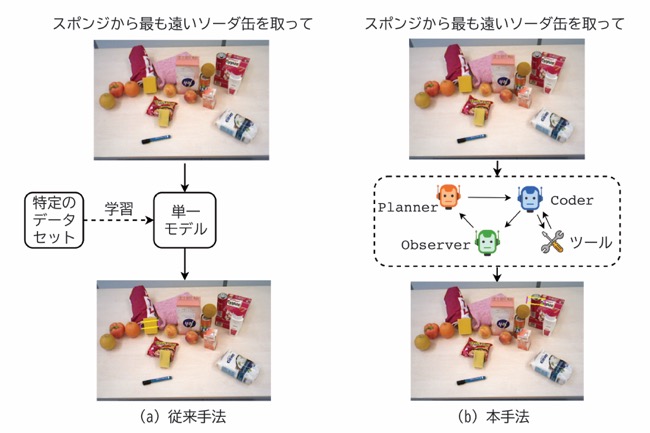
従来の単一モデルによる把持(a)と、Planner・Coder・Observerの協調によるGraspMAS(b)の比較
今回の成果により、家庭内サービスにおいてカジュアルな音声指示を理解するロボットや、物流倉庫で文脈に応じた作業を行うロボット、さらには医療や研究施設で安全に補助作業を行うロボットの実現が期待されます。
この研究成果は、中国時間2025年10月19日0時(日本時間10月19日午前1時)にThe 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS 2025)で発表されました。
詳しくは【情報理工_プレスリリース_20251019】をご覧ください。
学会情報
学会名:The 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2025)題名:GraspMAS: Zero-Shot Language-driven Grasp Detection with Multi-Agent System
著者名:Quang Nguyen, Tri Le, Huy Nguyen, Thieu Vo, Tung D. Ta, Baoru Huang, Minh N. Vu, and Anh Nguyen
URL:https://iros25.org/