 東京大学 研究
東京大学 研究筋肉のリングでしなやかに動く多関節ロボット
―筋肉で動く多関節グリッパや蛇型ロボットを実現―
【産学連携対象 全学共通分野 Discovery Saga】
【Sagaキーワード】
掲載日:2025年7月17日
概要
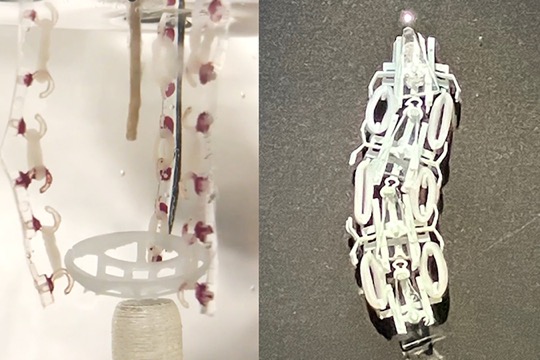
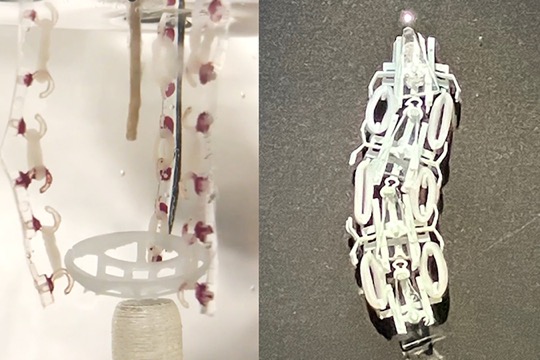
東京大学大学院情報理工学系研究科の竹内昌治教授と森田智博学振特別研究員らの研究グループは、リング状に成型された培養筋組織(筋肉リング)を用いて、“連続的で力強い収縮(強縮)”や“関節ごとのしなやかな運動”を行う多関節構造のバイオハイブリッドロボットを作ることに成功しました。従来、筋肉リングは培養筋組織の中でも特に安定的に作製しやすいことから、ロボットのみならず、筋肉を対象とした薬物試験モデルとしても広く利用されてきました。本培養法は、筋肉リングの成熟度と収縮特性を向上する技術であり、バイオハイブリッドロボットへの応用はもとより、医療・創薬分野における活用も期待されます。
この研究成果は、日本時間2025年7月17日、Science Advancesに掲載されました。
リリース文章 (PDFファイル: 526KB)
論文情報
Tomohiro Morita, Minghao Nie, and *Shoji Takeuchi, "Tetanus-driven biohybrid robots powered by muscle rings with enhanced contractile force,"Science Advances: 2025年7月17日科学と技術
バイオハイブリッド
培養筋組織
多関節ロボット
筋肉リング
蛇型ロボット
このページの内容に関する問い合わせは情報理工学系研究科までお願いします。
お問い合わせ